Method
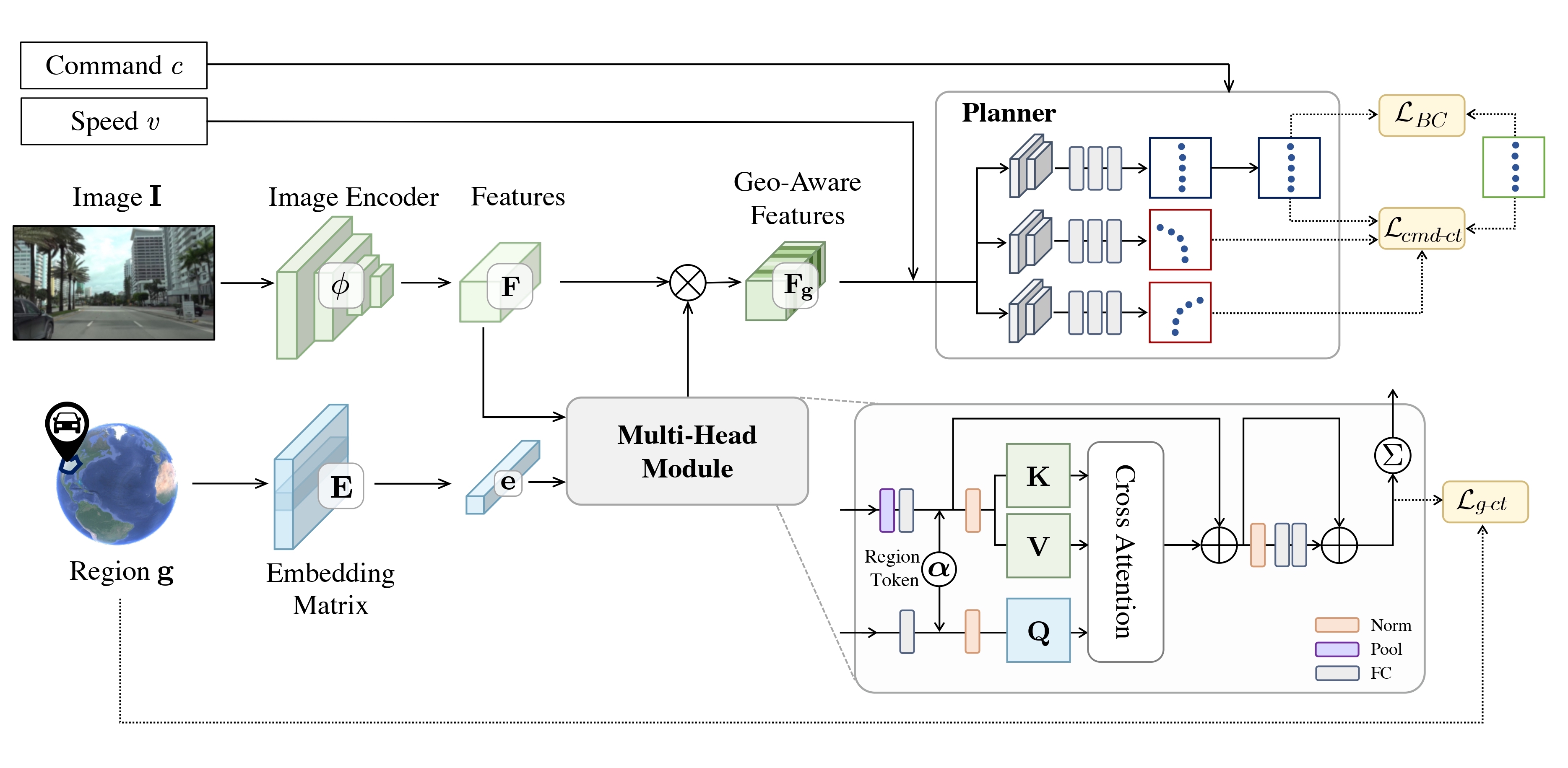
Our model maps image, region, speed, and conditional command observations to future decisions, parameterized as waypoints in the map view. To efficiently learn a high-capacity model, we leverage a multi-head cross attention module which fuses and adapts internal representations in a geo-aware manner. Our imitation objective, defined over human-demonstrated waypoints (outlined in green), the other command branches (outlined in red), and the predicted weights by the multi-head module, regularizes model optimization under diverse data distributions.
Qualitative Results
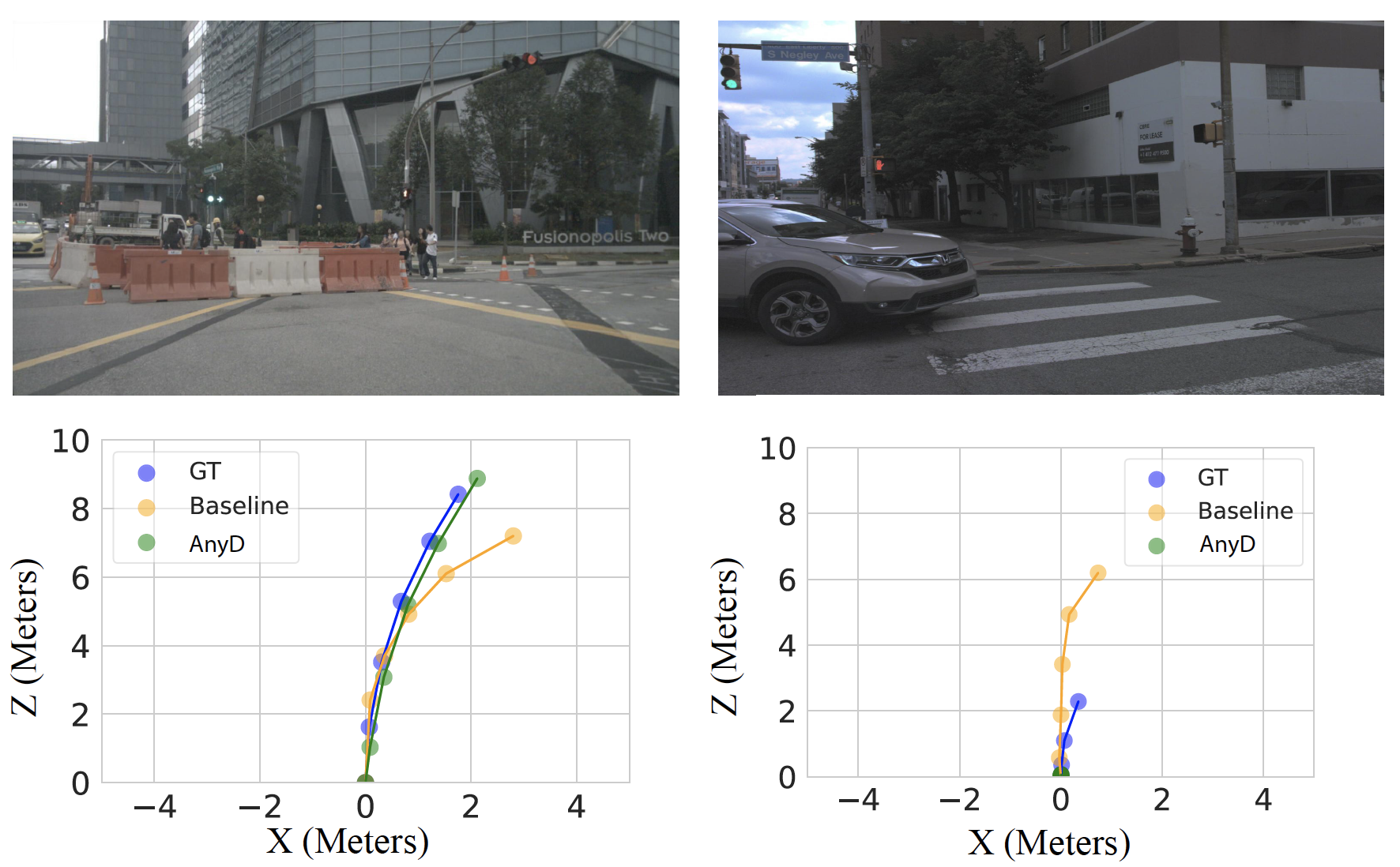
AnyD exhibits robustness in diverse scenarios, including turning right (wider turn) in Singapore and yielding to a ‘Pittsburgh left’.